リモコン式草刈機アースモアPROのGPS自動ドライブシステム利用・設定方法
2020年4月30日
リモコン式草刈機アースモアPROのオプション『GPS自動ドライブシステム』とはどのようなものかを簡単にご説明いたします。アースモアPROの購入には2種の選択があり、GPS自動ドライブシステムは後付けも可能
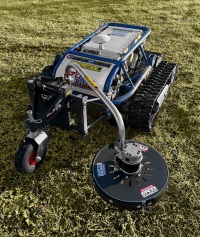
リモコン式(遠隔操縦式)草刈ロータリーナイフモア「アースモア PRO」は、標準販売はリモコン式(遠隔操縦式)操作で付属のリモコンで刈高、刈幅、走行速度、エンジン始動・停止を行います。リモコン(ラジコン)の通信最大距離は200mとなっています。

これとは別にオプション販売で『GPS自動ドライブシステム(Compass Servo Drive 通信システム)』があります。これは後付け可能で、上記をご購入後に後から購入し使用することができます。

GPS自動ドライブシステムではスマートフォン/タブレットを「使用する場合」と「使用しない場合」の2つの利用方法があります
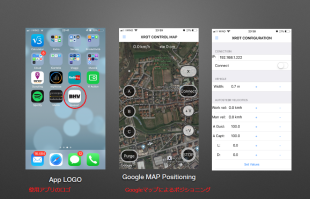
1.スマートフォン / タブレットを使用する場合
SIMカードのプロバイダー契約を行うことにより、スマートフォンやタブレットにメーカーの専用ソフトをダウンロードし、刈高、刈幅、走行速度、エンジン始動・停止、マップでの現在位置の確認、システムソフトウェア更新が可能となります。
GPS自動ドライブシステムにはルーターが内蔵されています。
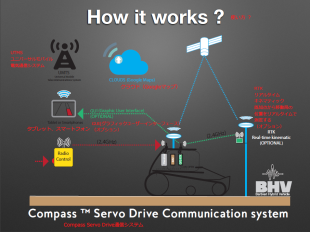

但し、データー受信するためにはデーターSIMカード(通話は必要ありません)のプロバイダー契約が必要になります。これはスマートフォンなどと同様で国内に二十数社ある契約会社の中から「使いたい回線」「データー量」「支払い方法」により契約します。

月額500円程度からあります。
※参考 : 22社の中から回線やデータ量、こだわりの条件から自分にあった格安SIMが見つかるサイトなどがあります。サイト「スマホ比較のすまっぴー」などがあります。
2.スマートフォン / タブレットを使用しない場合
SIMカードのプロバイダー契約は必要ありません。
始動時に刈高、刈幅、エンジン始動・停止はコントローラーで行います。
MODE1のみの対応となります。
GPS自動ドライブモードの種類
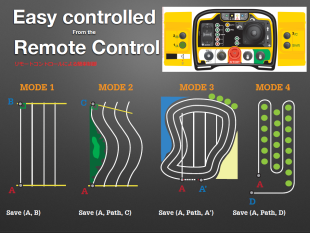
GPS自動ドライブモードは現在、MODE1〜MODE3までの3パターンから選ぶことができます。
MODE4については現在システムを開発中で、近いうちにシステムダウンロードにより利用が可能となります。
※2023年5月よりMODE4を追加
GPS自動ドライブモードの設定方法
刈る位置(場所)を認識させるためには実際に一度、主要となる点(作業開始点、折り返し点、作業終了点)に機械を走らせ認識させる必要があります。

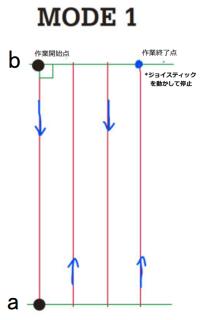
MODE1の設定方法
ア) エンジンを始動する。
◉重要:アースモア PROの方位をセットする必要があります。
「SHIFT」ボタンを押して、それから「A」ボタンを押しアースモア PROを10m前進させます。これによりアースモア PROは前進であることを学びます。
イ) 機械をフィールドの最初の左側コーナー(作業開始点b)に移動します。
「SHIFT」ボタンを押しながら「A」ボタンを押します。
これにより「AUTO」ランプが点滅を開始します。
ここで刈取りを始めたいなら「PTO」を押します。
ウ) 機械をフィールドの最終の左側コーナー(a)に移動し、「SHIFT」+「B」を押します。これにより”AUTO"ランプの点滅が終了します。
エ) 機械を数メートル後方に移動し、「SHIFT」ボタンを3秒間押し続けます。
これでGPS自動ドライブが動作し作業を開始します。
これ以降は作業開始点bと最終の左側コーナー(a)の位置情報を基に設定した幅と高さで草刈りを自動に行います。
オ) 作業終了点での停止は、コントローラーのジョイスティックでGPS自動ドライブシステムを停止します。
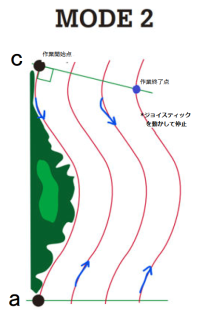
MODE2の設定方法
このモードはMODE1に似ていますが、アースモア PROで作業開始点ポイント「c」とポイント「a」の間を実際に走行し、その経路を認識させます。実際に走行する経路を認識させる点がMODE1と異なります。
ア) エンジンを始動する。
◉重要:アースモア PROの方位をセットする必要があります。
「SHIFT」ボタンを押して、それから「A」ボタンを押しアースモア PROを10m前進させます。これによりアースモア PROは前進であることを学びます。
イ) 機械をフィールドの最初の左側コーナー(作業開始点c)に移動します。
「SHIFT」ボタンを押しながら「A」ボタンを押します。
これにより「AUTO」ランプが点滅を開始します。
ここで刈取りを始めたいなら「PTO」を押します。
ウ) 走行したい曲線に合わせて機械をフィールドの最終の左側コーナー(a)に移動し、「SHIFT」+「C」を押します。これにより”AUTO"ランプの点滅が終了します。
エ) 機械を数メートル後方に移動し、「SHIFT」ボタンを3秒間押し続けます。
これでGPS自動ドライブが動作し作業を開始します。
これ以降は作業開始点(c)と最終の左側コーナー(a)の位置情報を基に設定した幅と高さで曲線に沿って平行に移動しながら草刈りを自動に行います。
オ) 作業終了点での停止は、コントローラーのジョイスティックでGPS自動ドライブシステムを停止します。
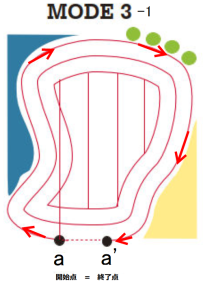
MODE3-1の設定方法
(刈り取り場所に障害物がない場合)
ア) 同上
イ) 作業開始点aに移動します。
印を付けた開始点aにアースモア PROをセットし、「SHIFT+A」ボタンを押します。
この「a」点からアースモア PROを動かしてこの開始点「a'」で正確に停止するように注意しながら、閉じる経路に沿ってアースモア PROを運転します。
ウ)「AUTO」ランプの点滅が終りしばらくの間オフ状態になったことでアースモア PROが閉じた経路を認識したことが分かります。
作業開始点「a」点と作業終了点が同じ場合は開始点「a」点に戻ったところで「SHIFT+A」ボタンを押すことでアースモア PROは閉じた経路を認識します。
エ) GPS自動ドライブシステムがこの閉じた経路における草刈りの最も効率的な経路を自動計算するとすぐに、AUTOランプが点灯します。
(AUTOランプが点滅している場合は、RESETボタンを押しGPS自動ドライブシステムをOFFにして、再度同じ操作をしてください)
オ) 「SHIFT+A」ボタンを押して閉じた経路を認識させたときは、SHIFTボタンを3秒間押すことでアースモア PROは作業を開始してこの赤線内の領域を自動的に判断して刈取りを行います。
カ) UTOランプが点灯状態であれば、「SHIFT」ボタンを押しアースモア PROから離れることが出来ます。
キ) その後アースモア PROは上記の領域内での草刈り作業を自動的に完了させます。
終了した時点でアースモア PROは自動的に作業を停止します。
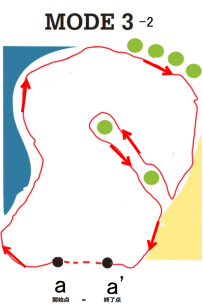
MODE3-2の設定方法
(刈り取り場所に池、小屋などの障害物がある場合)
ア) 同上
イ) 作業開始点aに移動します。
印を付けた開始点aにアースモア PROをセットし、「SHIFT+A」ボタンを押します。
ウ) この「a」点からアースモア PROを動かして赤い線のように障害物を避けて開始点「a」で正確に停止するように注意しながら、閉じる経路に沿ってを運転します。
エ) 作業終了点(開始点a)に停止すると「AUTO」ランプの点滅が終りしばらくの間オフ状態になったことでアースモア PROが閉じた経路を認識したことが分かります。(又はa点に戻ったところで再びSHIFT+Aボタンを押すことで閉じた経路を認識します。)
オ) GPS自動ドライブシステムがこの閉じた経路における草刈りの最も効率的な経路を自動計算するとすぐに、AUTOランプが点灯します。
(AUTOランプが点滅している場合は、RESETボタンを押しGPS自動ドライブシステムをOFFにして、再度同じ操作をしてください)
カ) 「SHIFT+A」ボタンを押して閉じた経路を認識させたときは、SHIFTボタンを3秒間押すことでアースモア PROは作業を開始してこの赤線内の領域を自動的に判断して刈取りを行います。
キ) UTOランプが点灯状態であれば、「SHIFT」ボタンを押しアースモア PROから離れることが出来ます。
ク) その後アースモア PROは上記の領域内での草刈り作業を自動的に完了させます。
終了した時点でアースモア PROは自動的に作業を停止します。
MODE4の設定方法
2023年5月から新たに追加しました。
※上記「GPS自動ドライブモードの種類」の図を参照