リモコン式草刈ロータリーナイフモアXRot【自動運転マニュアル】
2024年4月18日
リモコン式草刈ロータリーナイフモア アースモアPROシリーズ「XRot80」「XRot95」では、オプションのGPS自動ドライブシステムを搭載し、携帯電話会社と通信契約(SIM契約)をすることで自動制御運転が可能になります。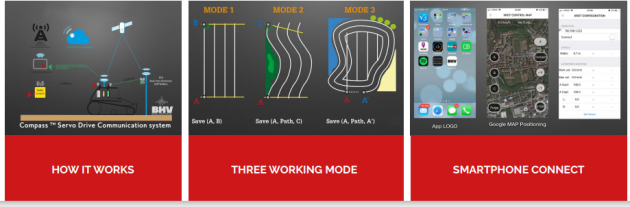
SIM契約は概ね月額500円程度です。これにより基準局の設置が不要です。衛星の捕捉数は12基で正確な作業を行うことができます。お手持ちのスマホやタブレットにアプリをダウロードすることで操作設定等を行うことが可能となります。

⇒アースモアPRO「XROT」の自動運転に必要な契約とデータ通信量
より精度の高い運転を望む場合はRTK-GNSSの他、ネットワーク型RTK-GNSS(VRS方式)を用いることで作業誤差±5㎝以下まで作業精度を上げることが可能となります。
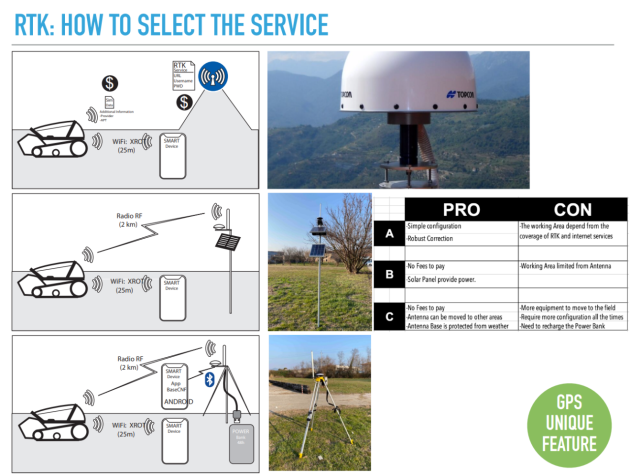
⇒リモコン草刈機XRotのオプション「RTK簡易設置式アンテナ」詳細

自動運転マニュアル

こちらからリモコン式草刈ロータリーナイフモアXRot【自動運転マニュアル】をダウンロードできます。
Compassサーボドライブ(自動運転)システムは、Xrotの運転性を向上させ、効率よく仕事を正確に行います。XRotには 3つのモードがあります。(RTKを使用する場合は4つ)
※安全上監視員は必要です。
以下、利用可能なモードについて説明します。
LED&LABEL 'AUTO'

リモコンの LED「AUTO」は、Compassサーボドライブのステータスに関する情報を示します。
- LED 点灯: XRot がCompassサーボドライブと連携しています。
- LED 点滅: XRot は新しいパスを記録しています。
- LABEL(ラベル)「AUTO」が表示されます。
注: 「AUTO」というLABELが右上に表示されます。画面の「AUX」LABELの上にあります。
操作ボタン

コントローラーの両側にボタンがあります。これらは Compassサーボドライブで動作するために重要です。
詳細は機械の取扱説明書に記載されています。
草刈幅

XRotがCompassサーボドライブで動作する場合、同じ場所を通ることはありません。
機種の草刈幅に応じ5㎝ラップさせ走行します。
機種ごとの刈幅は5㎝ラップを考慮し以下となります。
- XRot95evo: 90cm
- XRot80evo: 75cm
- XRot70evo/ERot70: 65cm
このラップ幅は変更が可能です。
コントローラーのSHIFT+スピードレバーを押すと5cmずつ増減します。
オペレーターはWebアプリからもカット幅を変更することができます。
切断幅を変更すると、次回の使用のために保存されます。
草刈速度

XRot の動作速度は、リモコンのスピードレバーで調整します。
Webアプリで設定できる制限速度は 6Km/hです。
作業方向

ラインの終点で操縦方向を変更するにはコントローラーのSHIFTボタンを押して、レバーを機械に動かしたい方向に(左/右)に回して動かします。
COMPASS サーボドライブの動作モード
MODE 1 - 直線的な経路での作業
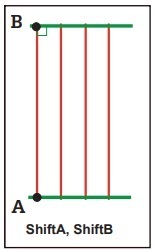
1) XRotをフィールドの開始点 (写真のA点) まで移動します。
2) XRotが静止状態で、SHIFT + A を押してからB点に向かいます。AとB点をインプットの開始をします。
3) XRot を終了点 (B) まで移動}し、停止してから SHIFT + B を押します。
LED AUTO の点滅が止まり、「AUTO」というラベルが表示されます。これは、GPS を開始する準備ができており、経路が適切に記憶されていることを示します。
4) XRot を 1m 後方 (B点から) に移動し、SHIFT を3秒間 押します。
これによりCOMPASSサーボドライブを開始します。この時、機械上部のスマートランプが白色に点灯します。(PTO がオンの場合は白色に点滅します)
これ以降、オペレーターが停止するまでラインAからBの直線に平行に右にシフトしながら自動運転を繰り返します。
NOTE: オペレーターがコントロールレバーを動かすと自動運転を停止します。
【MODE 1 での作業動画】: 「ERot70」での草刈作業の動画
MODE 2 - 曲線的な経路での作業
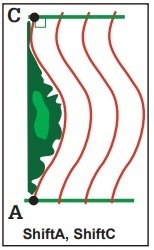
1) XRotをフィールドの開始点 (写真のA点) まで移動します。
2) XRotが静止状態で、SHIFT + A を押してからC点に向かいます。LED AUTO が点滅し始めます。この時動かしたい曲線に合わせて移動します。
3) XRotを終了点 (C) まで移動し、停止してから SHIFT + C を押します。
これによりCOMPASSサーボドライブを開始します。この時、機械上部のスマートランプが白色に点灯します。(PTO がオンの場合は白色に点滅します)
これ以降、オペレーターが停止するまでラインAからBの直線に平行に右にシフトしながら自動運転を繰り返します。
NOTE: オペレーターがコントロールレバーを動かすと自動運転を停止します。
【MODE 2 での作業動画】: 「ERot70」での草刈作業の動画
MODE 3 - 外周内を自動計算で作業
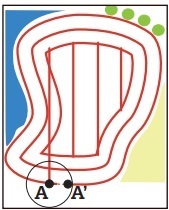
モード3 は、記憶した外周の内側を自動で作業します。
1) XRotをフィールドの開始点 (写真の点 A) まで移動します。
2) XRotが静止状態で、SHIFT + A を押してから外周を移動します。LED AUTO が点滅し始めます。この時動かしたい曲線に合わせて移動します。
3) 外周を描きスタート地点Aに到着すると、LEDが点灯します。AUTO の点滅が止まります。「AUTO」というラベルが表示されるまで、最大 30 秒ほど待ちます。
4) 3秒間押して COMPASSサーボドライブを開始します。この時、機械上部のスマートランプが 白色に点灯します。 (PTO がオンの場合は白色に点滅します)
NOTE: XRotは、効率的な作業経路を自動で計算します。
外周に沿って内側に向かい作業を行い、直線作業が可能になった時点でMODE1の動きとなります。
【MODE 3 での作業動画】: 「ERot70」での草刈作業の動画
IMPORTANT: MODE1〜3 は、RTK なしでも使用できます。
但し、経路データーの保存ができないため作業開始に併せて作業範囲の設定を上記の手順で行わなければなりません。RTK使用の場合は作業データーが保存されます。そのため同じ場所を作業する場合は作業毎の設定が不要となります。
MODE 4 - ブドウ畑など果樹園での作業
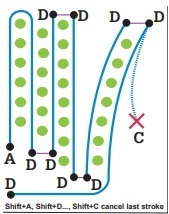
IMPORTANT: MODE4 は RTK が有効になっている場合にのみ使用できます。
(簡易アンテナ又は、 RTK プロバイダー契約)
このモードを説明するために、ブドウ畑での作業を例に挙げます。
1) XRotをフィールドの開始点 (写真の点 A) まで移動します。
2) SHIFT + A を押して、ルートを記憶する手順を開始します。
3) XRotを列の最後まで移動し、最後の障害物から最低 1.5 m 離れた所に行き次に、SHIFT + D を押して最初の行を保存します。
4) XRotを2列目の先頭まで移動します。(障害物から最低 1.5 m 離します)
5) XRot を正しく指定したら、もう一度 SHIFT + D を押して 2行目の開始点を設定します。
6) XRotを列の最後尾まで運転し、最後の障害物から最低 1.5m 離れた所に停止します。次に、SHIFT + D を押します。これで 2 行目が保存されます。
これらのポイント 4、5、6 で行った動作を作業する列ごとに繰り返します。
オペレーターが行を間違えた場合 (A-D または D-D)、SHIFT + C を押すとキャンセルできます。その場合は、保存された最後の「D地点」に XRot を戻し、最後の行の記憶手順を再開します。また、記憶手順中に RTK 信号が失われた場合、最後のラインが自動的に消去される可能性があります。その場合は、最後に保存した「D地点」からやり直してください。
7) COMPASSサーボドライブの使用を開始し、以前に保存したプログラムを実行する場合は、XRotを開始点 (A)
まで移動し、 SHIFT を 3秒間押します。
【MODE 4 での作業動画】: 「XRot95」で「スプレイヤー(噴霧器)」作業の動画
動作モードの概要